研究シーズの特徴・独自性
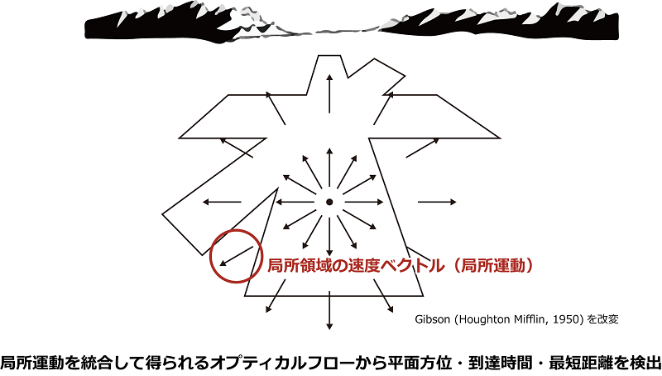
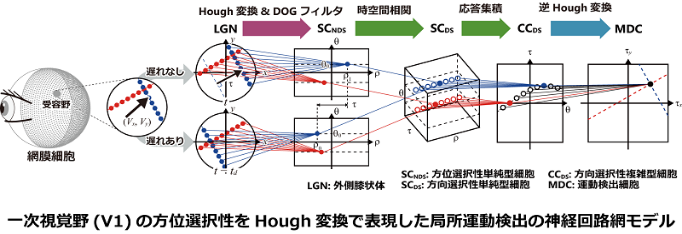
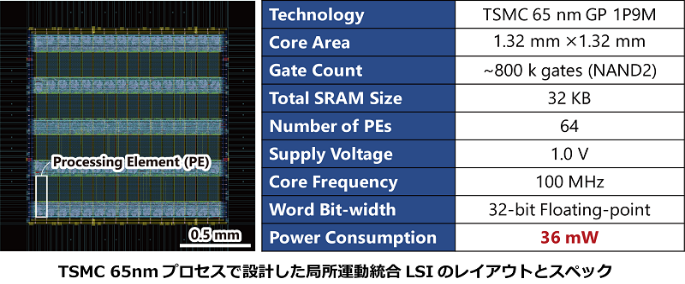
生体の優れた視覚機能を模擬した視覚情報処理システムの実現に向けて、運動視に基づく空間認識の神経回路網モデルの構築とその集積回路化について研究している。このモデルでは、対象物の移動方向と速度を知らなくても、到達時間・平面方位・最短距離を検出できる。このモデルを実時間で実行するために試作した集積回路は電力効率に優れ、従来の計算機の100 分の1 以下の消費電力で動作する。
産学連携の可能性
近年、インフラ点検・農業・物流の効率化を目的としたドローンの需要が急速に伸びている。本研究成果を応用することで、周囲の空間を正確に把握して衝突することなく自律的に飛行するドローンの実現が見込まれる。